AerialCSP Dataset
Introduction
AerialCSP is a virtual dataset that simulates aerial imagery of Concentrated Solar Power plants. By generating synthetic data that closely mimics real-world conditions, we aim to facilitate pretraining of models before deployment, significantly reducing the need for extensive manual labeling.
Dataset Overview

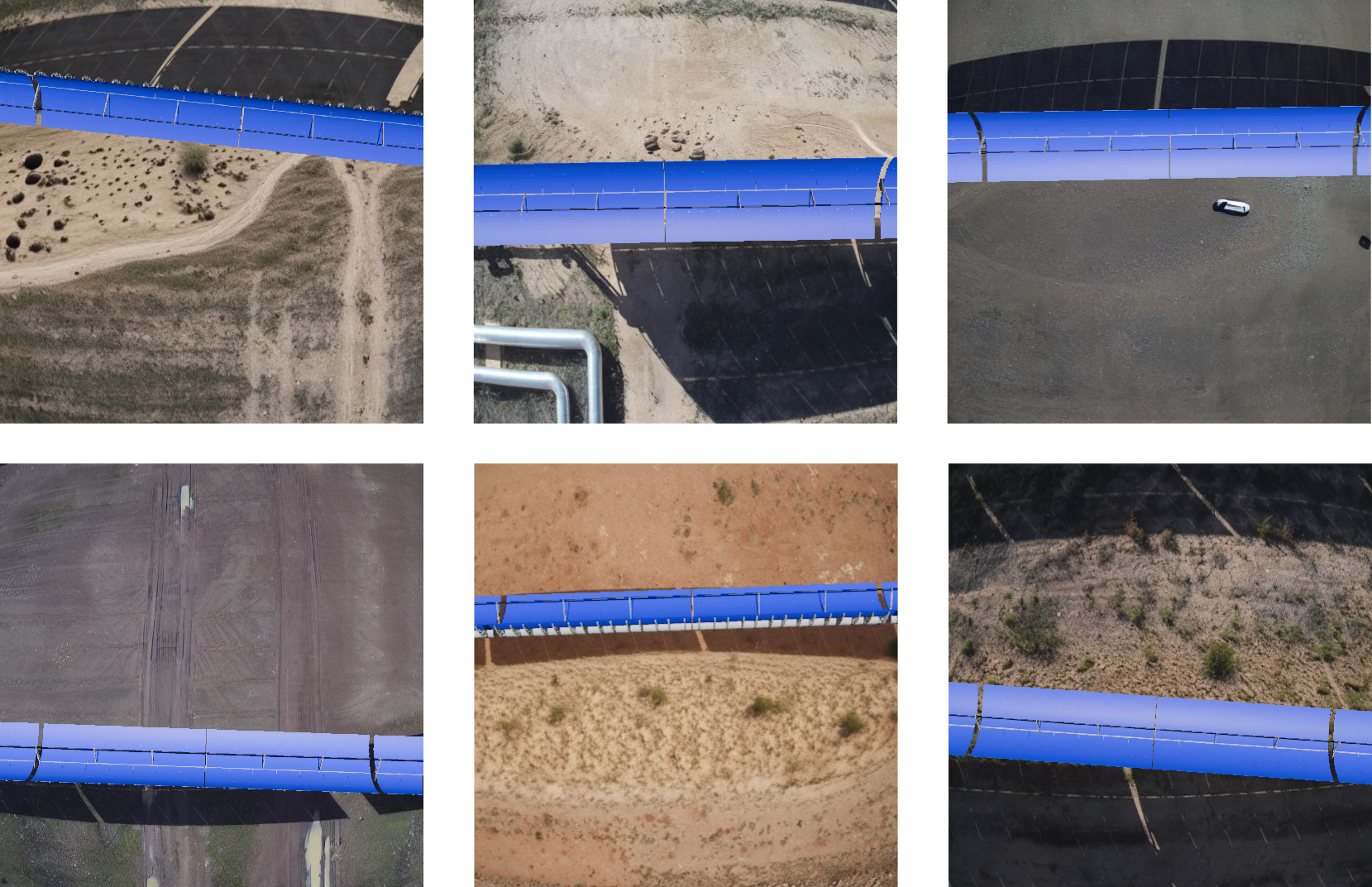
The final AerialCSP dataset is created by compositing the rendered Blender images onto the inpainted backgrounds. To introduce variability, we apply random scaling and rotations to the synthetic SCE images before pasting them onto the backgrounds. These transformations are also applied to the corresponding segmentation masks to maintain annotation consistency. AerialCSP is designed to support two primary computer vision tasks:
- Object Detection: Each image is accompanied by a YOLO-formatted annotation file containing bounding box information. The annotation format follows
<class> <x_center> <y_center> <width> <height>, where all coordinates are normalized (0 to 1), and class indices are zero-indexed. - Instance Segmentation: Segmentation masks are stored in a format where each line corresponds to an object and follows
<class-index> <x1> <y1> <x2> <y2> ... <xn> <yn>, where (x, y) coordinates define the polygonal mask of the object and are normalized within [0,1]. Additionally, we provide the masks as grayscale images, where each pixel value corresponds to a different class. The user can extract their own segmentation format using these images directly. The class values associated to each object are stored in this config file.
To ensure fair comparisons, we provide a standardized dataset split into training, validation, and test sets, following a 75%-15%-10% distribution. In total, AerialCSP contains 18 058 labeled images.
Using the Dataset
The AerialCSP dataset is available as a zip file containing the following structure
- A folder named
cfg_train_val_test_splitwhere we provide a standardized dataset split to ensure fair comparisons, using three txt files containing the names of the images on the traning, validation and test set. - A folder named
images_and_maskswhere we store the rendered images and segmentation masks. - A folder named
labels_per_taskcontaining two additional folders. Each folder contains the labels for a specific task, that is, bounding box detection or image segmentation in YOLO format.
Benchmarks
We use YOLOv11 (https://docs.ultralytics.com/models/yolo11/) to provide some benchmarks to our dataset. The results are shown in the following table:
| Model | Task | mAP50 (mean Average Precision) |
|---|---|---|
| YOLOv11n | Bounding Box Detection | 95.3 |
| YOLOv11m | Bounding Box Detection | 96.2 |
| YOLOv11x | Bounding Box Detection | 96.1 |
| YOLOv11n-seg | Image Segmentation | 70.7 |
| YOLOv11m-seg | Image Segmentation | 73.2 |
| YOLOv11x-seg | Image Segmentation | 73.3 |
Download the Dataset
You can request AerialCSP dataset in the the following link
AerialCSP is property of Virtualmechanics S.L.
This repository and AerialCSP are intended for research and educational purposes only. For commercial use, please contact the authors.
AerialCSP is realased under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0) license.
Citation
If you use the AerialCSP dataset in your research, please cite the following paper:
Pérez-Cutiño, M. A., Valverde, J., Capitán, J., Díaz-Bañez, J. M. (2025). Reducing the gap between general purpose data and aerial images in concentrated solar power plants. arXiv preprint, DOI: https://doi.org/10.48550/arXiv.2508.00440.